Como construir um aspirador robô você mesmo – 2 ideias de montagem
No ritmo acelerado da vida moderna, manter a casa limpa nem sempre é fácil. A tecnologia moderna pode ajudar. Os aspiradores de pó robóticos existem há mais de 15 anos. Eles geralmente se parecem com um disco grande que se move pelo cômodo seguindo um padrão predefinido ou aleatoriamente (até esbarrar em algo) e coleta a sujeira. Oferecemos duas instruções passo a passo sobre como construir seu próprio aspirador de pó robótico.
Materiais para montagem
Para montar um robô aspirador de pó, você precisa entender seus componentes. Vamos analisá-los passo a passo. Ele precisa se movimentar pela sala sozinho, então precisa de motores — de dois a quatro, dependendo do projeto final — além da capacidade de inverter o sentido de rotação e a velocidade, o que significa que você precisa de uma placa de controle de motores. Se estiver usando motores CC, você precisará de uma placa com quatro transistores (uma ponte H).
Um aspirador robô caseiro precisa detectar colisões com paredes e móveis. Isso requer sensores de obstáculos e interruptores de limite no para-choque. O elemento funcional — o aspirador — também é necessário. Ele deve ser projetado para operar com baixa tensão CC (por exemplo, 12V).
Além de um aspirador de pó, você precisa de uma escova rotativa que limpe a superfície, levante as fibras do tapete e remova os detritos. Isso requer um ou dois motores adicionais.
Um sistema que controle tudo isso. A opção mais simples é uma placa Arduino. Qualquer placa serve para essa tarefa; as placas Nano ou Pro Mini têm o tamanho ideal.
Ideia nº 1: Um aspirador de pó robô feito de papelão
A base do robô é feita de papelão grosso. O ideal é colá-lo em algumas camadas, com as fibras alinhadas perpendicularmente. Para os componentes técnicos, você precisará das seguintes peças:
- Qualquer placa Arduino.
- Uma placa de ensaio ou uma placa de ensaio simples, em princípio você pode fazer sem ela, basta soldar tudo.
- 2 sensores de distância ultrassônicos (telêmetro).
- Turbina de aspirador de pó.
- Um pequeno motor ou refrigerador de computador.
- Motores com caixas de engrenagens e rodas.
- Controlador do motor.
- Fios para conexões de circuitos.
- Baterias e controlador de carga.
O robô precisa de três baterias de lítio para funcionar. Cada uma tem uma voltagem de 3,7 V. É necessário um controlador para carregá-las, como o da foto:

Controlador
Para controlar os motores do robô aspirador, é conveniente usar um módulo baseado no microchip L298. Trata-se de um circuito em ponte H, que pode ser montado com componentes individuais, mas comprar uma placa pronta é mais confiável. Ele permite ajustar a velocidade e a direção do robô aspirador.

Módulo de controle
Para regular a velocidade, um sinal PWM é aplicado ao pino ENA ou ENB, e para definir o sentido de rotação, sinais opostos são aplicados aos pinos IN1 e IN2 para um motor e IN3 e IN4 para o outro. Se IN1 estiver em nível lógico 1 e IN2 em nível lógico 0, o motor gira em um sentido. Para inverter o sentido, troque os 1s pelos 0s. A montagem deve ser feita com um Arduino utilizando o diagrama a seguir (você pode usar quaisquer pinos; basta especificá-los no programa).

circuito Arduino
Em seguida, você precisa fazer uma base de papelão e fixar as rodas nela. O resultado deve ser algo parecido com isto:

Base de papelão
Aqui está uma vista de baixo. Duas rodas motrizes com uma caixa de engrenagens angular e uma roda giratória:

Distância entre eixos
Agora você precisa montar o circuito que será instalado na base. A base deve ter cerca de 30 cm de diâmetro para acomodar tanto os componentes eletrônicos quanto a própria unidade do aspirador de pó.

Montando a caixa
Em vez de sensores de distância, você pode usar um sistema montado no para-choque conectado a interruptores de limite. Ao colidir com um obstáculo, o sistema de controle sinalizará uma mudança de direção.

para-choque
Você também pode fazer seus próprios para-choques de contato. Você precisará de um fio fino, porém rígido, como um cabo de par trançado. Para isso, crie uma área de contato na parte interna do para-choque usando papel alumínio e fixe o fio conforme mostrado abaixo. Quando o robô aspirador colidir com móveis ou paredes, eles farão contato. Ajuste a distância entre o fio e o papel alumínio para obter a sensibilidade desejada e evitar alarmes falsos. Aplique 5V ao papel alumínio e conecte o fio à entrada do Arduino, que é puxada para o negativo por meio de um resistor de alguns quiloohms.

para-choque de contato caseiro
O dispositivo é alimentado por baterias; estabilizadores lineares como o L7805 podem ser usados para alimentar o sistema de controle. Um conversor abaixador, como o LM2596, é adequado para ajustar a velocidade do motor.
A parte mais difícil é projetar e montar o aspirador de pó. Aqui está um esboço:

Diagrama do aspirador de pó
Retiramos as pás originais do ventilador e acoplamos uma turbina de aspirador de pó ao rotor. É importante fixar a turbina precisamente no centro, caso contrário, criarão desequilíbrios e vibrações.

Turbina robótica
Esta é a aparência da parte traseira da turbina quando fixada ao rotor do resfriador. Ela pode ser fixada com cola quente ou supercola.

Vista da turbina a partir do interior.
É só isso, um guia passo a passo para montar um robô aspirador de pó feito com materiais reciclados. Seu algoritmo de funcionamento é o seguinte: o robô aspirador de pó avança até encontrar um obstáculo. Após a colisão (ou aproximação, se você estiver usando sensores ultrassônicos), ele para, recua uma distância predeterminada, gira em um ângulo aleatório e continua se movendo.
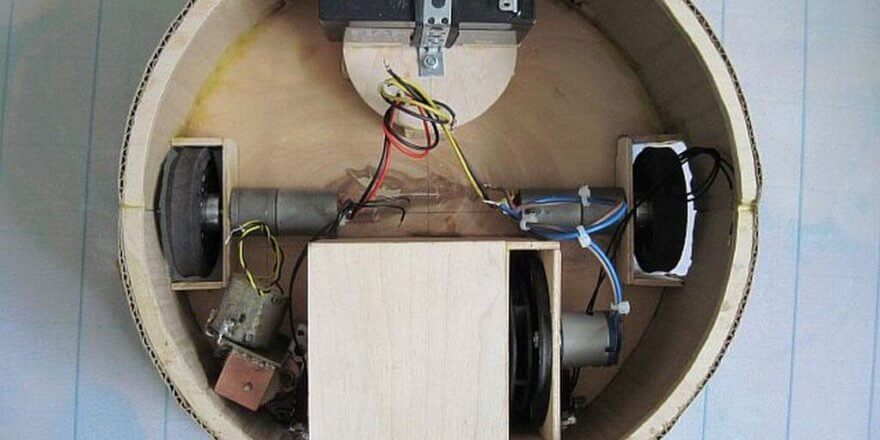
Ideia nº 2: Um robô quase como uma fábrica
Apresentamos a vocês um projeto mais simples de aspirador robô. Veja como ele fica depois de montado:

Aspirador de pó robótico caseiro
O sistema de navegação é composto por um conjunto de seis sensores de obstáculos infravermelhos. Caso nenhum deles seja acionado, dois sensores de contato (chaves de fim de curso) são fornecidos. O sistema de controle do motor utiliza o mesmo driver com um microchip L298N. Para montá-lo, você precisará de:
- A placa Arduino utilizada era originalmente a Pro-mini.
- Um adaptador USB-TTL para programar este modelo de Arduino. Se você estiver usando um Arduino Nano, não precisará dele, pois ele suporta programação via USB.
- Driver para motores L298N.
- Motores para rodas com caixa de câmbio.
- 6 sensores infravermelhos.
- Motores para a turbina (se possível, mais potentes).
- Impulsor da turbina do aspirador de pó.
- Os motores com escova podem ser de qualquer tipo.
- 2 sensores de colisão.
Monte tudo isso de acordo com este esquema:

diagrama de montagem do aspirador robô
Para montar o circuito de alimentação de um aspirador robô, você precisará de:
- São adequadas 4 baterias de lítio do tipo 18650.
- 2 conversores DC/DC (elevador e redutor).
- Controlador para carga e descarga de duas baterias (pesquise online por "controlador de íon-lítio 2s"). O circuito utiliza uma conexão em série de duas células conectadas em paralelo, resultando em uma tensão de saída superior a 7,4 V. O circuito em paralelo é utilizado para aumentar a capacidade e a vida útil da bateria.
Segue o diagrama da fonte de alimentação deste robô:

Diagrama da fonte de alimentação
Além disso, você precisará de plástico (PVC) ou qualquer outro material para o corpo do robô; você pode imprimi-lo em uma impressora 3D, se tiver essa possibilidade.
Este projeto "faça você mesmo" requer firmware. Aqui está um exemplo de um algoritmo de limpeza aleatória que encontramos online. Baixe o código aqui: firmware para um aspirador de pó robô.
Este artigo discutiu dois projetos de aspiradores de pó robóticos que você pode replicar e construir. É possível construir um aspirador de pó automático para ambientes por um custo entre US$ 30 e US$ 100. Os componentes mais caros são as baterias, os motores e as placas Arduino. Se você já construiu um aspirador de pó robótico caseiro ou criou um projeto diferente, compartilhe seus exemplos nos comentários. Agradecemos a troca de ideias!
Por fim, recomendamos assistir a estes vídeos, que demonstram claramente mais algumas ideias para construir um aspirador robô em casa:








Obrigado pelo artigo!
Para sua informação, “dvigatelya” não é uma palavra em russo.
Mas isso é apenas um defeito estético do artigo.)
Olá, meu nome é Yuri e estou terminando um projeto de construção. Há uma montanha de poeira e tive a ideia de construir um robô aspirador de pó. No entanto, meu conhecimento de eletrônica se limita ao que aprendi na escola. Pesquisei alguns materiais e gostei da escova Meleon. Se colocada em um robô aspirador, ela deixará um pequeno canto sem limpar, e a escova horizontal pode ser feita de qualquer maneira.
Muito obrigada!!! Ficou muito claro! E como faço para garantir que a comida retorne à base?