Jak si vyrobit robotický vysavač svépomocí – 2 nápady na montáž
V dnešním uspěchaném životním stylu není udržování čistoty v domácnosti vždy snadné. Moderní technologie s tím mohou pomoci. Robotické vysavače existují již přes 15 let. Obvykle připomínají velký puk, který se pohybuje po místnosti podle předem daného vzoru nebo náhodně (dokud do něčeho nenarazí) a sbírá nečistoty. Nabízíme dva podrobné návody, jak si vyrobit vlastní robotický vysavač.
Materiály pro montáž
Abyste si tedy mohli sestavit robotický vysavač, musíte porozumět jeho komponentům, pojďme si je krok za krokem projít. Musí se sám pohybovat po místnosti, takže potřebuje motory – dva až čtyři, v závislosti na konečném návrhu – a také možnost přepínat směr otáčení a rychlost, což znamená, že potřebujete řídicí desku motoru. Pokud používáte stejnosměrné motory, budete potřebovat desku se čtyřmi tranzistory (H-můstek).
Domácí robotický vysavač musí detekovat kolize se stěnami a nábytkem. To vyžaduje senzory překážek a koncové spínače na „nárazníku“. Zapotřebí je také pracovní prvek – vysavač. Musí být navržen pro provoz s nízkým stejnosměrným napětím (např. 12 V).
Kromě vysavače potřebujete rotační kartáč, který vyčistí povrch, zvedne vlas koberce a smete nečistoty. To vyžaduje jeden nebo dva další motory.
Systém, který tohle všechno bude řídit. Nejjednodušší možností je deska Arduino. Pro tento úkol postačí jakákoli deska; desky Nano nebo Pro mini mají pro tento úkol správnou velikost.
Nápad č. 1: Robotický vysavač vyrobený z kartonu
Základna robota je vyrobena z tlusté lepenky. Nejlepší je ji slepit v několika vrstvách s kolmo orientovanými vlákny. Pro jeho technické komponenty budete potřebovat následující sadu dílů:
- Jakákoli deska Arduino.
- Prkénko nebo jednoduché prkénko, v principu se bez něj obejdete, stačí všechno připájet.
- 2 ultrazvukové senzory vzdálenosti (dálkoměr).
- Turbína vysavače.
- Malý motor nebo chladič z počítače.
- Motory s převodovkami a koly.
- Řídicí jednotka motoru.
- Dráty pro zapojení obvodů.
- Baterie a regulátor nabíjení.
Robot potřebuje k napájení tři lithiové baterie. Každá má napětí 3,7 V. K jejich nabíjení je potřeba ovladač, jako je ten na fotografii:

Ovladač
Pro ovládání hnacích motorů robota je vhodné použít modul založený na mikročipu L298. Jedná se o obvod s H-můstkem a můžete si ho sestavit sami z jednotlivých součástek, ale spolehlivější je koupit hotovou desku. Umožňuje nastavit rychlost robotického vysavače a změnit jeho směr.

Řídicí modul
Pro regulaci otáček se na pin ENA nebo ENB přivede PWM signál a pro nastavení směru otáčení se na IN1 a IN2 pro jeden motor a na IN3 a IN4 pro druhý motor přivedou opačné signály. Pokud je IN1 v logické 1 a IN2 v logické 0, motor se otáčí jedním směrem. Pro změnu směru otáčení prohoďte jedničky s nulami. Mělo by být sestaveno pomocí Arduina podle následujícího diagramu (můžete použít libovolné piny; ty určíte v náčrtu).

Obvod Arduina
Dále je třeba vyrobit základnu z kartonu a připevnit k ní kola. Měli byste dostat něco jako toto:

Kartonová základna
Zde je pohled zespodu. Dvě hnací kola s úhlovou převodovkou a otočným kolem:

Rozvor kol
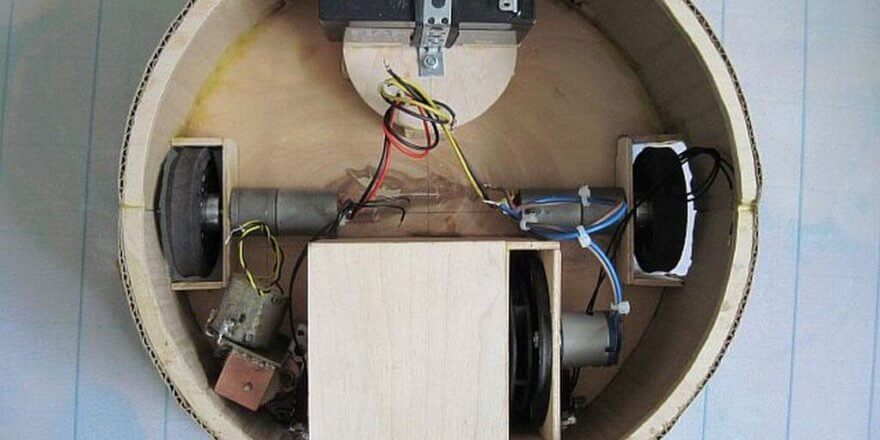
Nyní je třeba sestavit obvod, který bude namontován na základnu. Základna by měla mít průměr asi 30 cm, aby se do ní vešla jak elektronika, tak i samotná jednotka vysavače.

Sestavení pouzdra
Místo dálkoměrů můžete použít systém namontovaný na nárazníku, který je připojen k koncovým spínačům. Při srážce s překážkou řídicí systém signalizuje změnu směru.

Nárazník
Kontaktní nárazníky si můžete vyrobit i svépomocí. Budete potřebovat tenký, ale pevný drát, například kroucenou dvojlinku. K tomu vytvořte na vnitřní straně nárazníku kontaktní plošku pomocí fólie a drát upevněte, jak je znázorněno níže. Když robotický vysavač narazí do nábytku nebo zdí, dojde ke kontaktu. Upravte vzdálenost od drátu k fólii, abyste dosáhli požadované citlivosti a zabránili falešným poplachům. Na fólii se přivede 5 V a drát jde na vstup Arduina, kde je přiveden k zápornému pólu přes odpor několika kiloohmů.

Domácí kontaktní nárazník
Zařízení je napájeno bateriemi; k napájení řídicího systému lze použít lineární stabilizátory, jako například l7805. Pro nastavení otáček motoru je vhodný snižující měnič, například LM2596.
Nejtěžší je navrhnout a sestavit vysavač. Zde je hrubý nákres:

Schéma vysavače
Původní lopatky ventilátoru odlomíme a na jeho rotor připevníme turbínu vysavače. Je důležité turbínu přesně upevnit uprostřed, jinak dojde k nerovnováze a vibracím.

Robotová turbína
Takto vypadá zadní část turbíny, když je připevněna k rotoru chladiče. Lze ji upevnit tavným lepidlem nebo sekundovým lepidlem.

Pohled na turbínu zevnitř
To je vše, co k tomu patří – podrobný návod na sestavení robotického vysavače z improvizovaných materiálů. Jeho algoritmus fungování je následující: robotický vysavač se pohybuje vpřed, dokud nenarazí na překážku. Po srážce (nebo přiblížení, pokud používáte ultrazvukové dálkoměry) se zastaví, posune se o předem určenou vzdálenost dozadu, otočí se v náhodném úhlu a pokračuje v pohybu.
Nápad č. 2: Robot téměř jako z továrny
Představujeme vám jednodušší projekt robotického vysavače. Takto vypadá po sestavení:

Domácí robotický vysavač
Navigační systém je sestaven ze sady šesti infračervených senzorů překážek. Pro případ, že se žádný z nich neaktivuje, jsou k dispozici dva kontaktní senzory (koncové spínače). Systém řízení motoru používá stejný ovladač s mikročipem L298N. K jeho sestavení budete potřebovat:
- Původně byla použita deska Arduino Pro-mini.
- Adaptér USB-TTL pro programování tohoto modelu Arduina. Pokud používáte Arduino Nano, nebudete ho potřebovat, protože podporuje programování přes USB.
- Ovladač pro motory L298N.
- Motory pro kola s převodovkou.
- 6 infračervených senzorů.
- Motory pro turbínu (pokud možno výkonnější).
- Oběžné kolo turbíny vysavače.
- Kartáčové motory mohou být jakékoli.
- 2 kolizní senzory.
Sestavte to vše podle tohoto schématu:

Schéma sestavení robotického vysavače
Pro sestavení napájecího obvodu robotického vysavače budete potřebovat:
- 4 lithiové baterie, vhodné jsou typy 18650.
- 2 DC/DC měniče (zvyšující a snižující).
- Regulátor pro nabíjení a vybíjení dvou baterií (vyhledejte online „2s li-ion controller“). Obvod využívá sériové zapojení dvou paralelně zapojených článků, což má za následek výstupní napětí vyšší než 7,4 V. Paralelní zapojení se používá ke zvýšení kapacity a životnosti baterie.
Zde je schéma napájení pro tohoto robota:

Schéma napájení
Kromě toho budete potřebovat plast (PVC) nebo jakýkoli jiný materiál pro tělo robota; pokud máte takovou příležitost, můžete si ho vytisknout na 3D tiskárně.
Tento DIY projekt vyžaduje firmware. Zde je příklad algoritmu náhodného čištění, který jsme našli online. Stáhněte si náčrt zde: firmware pro robotický vysavač.
Tento článek pojednával o dvou konstrukcích robotických vysavačů, které si můžete sami replikovat a postavit. Automatický čistič pokojů si můžete postavit za 30 až 100 dolarů. Nejdražšími komponenty jsou baterie, motory a desky Arduino. Pokud se vám podařilo úspěšně postavit domácí robotický vysavač nebo přijít s jiným designem, podělte se prosím o své příklady v komentářích. Vítáme otevřenou komunikaci!
Nakonec doporučujeme shlédnout tato videa, která názorně demonstrují několik dalších nápadů na výrobu robotického vysavače doma:








Díky za článek!
Pro vaši informaci, slovo „pohon“ v ruštině neexistuje.
Ale to je jen kosmetická vada článku.)
Ahoj, jmenuji se Yuri a dokončuji stavební projekt, je tu moře prachu. Napadlo mě vyrobit robotický vysavač, ale o elektronice vím jen tolik, co ve škole. Prohlédl jsem si nějaké materiály, líbil se mi kartáč Meleon, když ho dáte na robotický vysavač, tak zůstane malý roh neuklizený a horizontální kartáč si můžete vyrobit libovolně.
Moc děkuji!!! To je naprosto jasné! A jak zajistím, aby se jídlo vrátilo na základnu?