Как сами да си направите робот прахосмукачка – 2 идеи за сглобяване
В днешния забързан начин на живот поддържането на дома ви чист не винаги е лесно. Съвременните технологии могат да помогнат. Роботизираните прахосмукачки съществуват от над 15 години. Те обикновено приличат на голяма шайба, която се движи из стаята по предварително зададен модел или на случаен принцип (докато не се удари в нещо) и събира отпадъци. Предлагаме две инструкции стъпка по стъпка как да си направите сами роботизирана прахосмукачка.
Материали за сглобяване
И така, за да сглобите роботизирана прахосмукачка, трябва да разберете нейните компоненти, нека ги разгледаме стъпка по стъпка. Тя трябва да се движи сама из стаята, така че са ѝ необходими двигатели – от два до четири, в зависимост от крайния дизайн – както и възможност за превключване на посоката на въртене и скоростта, което означава, че ви е необходима платка за управление на двигателя. Ако използвате DC двигатели, ще ви е необходима платка с четири транзистора (H-мост).
Домашно приготвената робот прахосмукачка трябва да открива сблъсъци със стени и мебели. Това изисква сензори за препятствия и крайни изключватели на „бронята“. Работният елемент – прахосмукачката – също е необходим. Тя трябва да е проектирана да работи с нисковолтов постоянен ток (напр. 12V).
В допълнение към прахосмукачката, ви е необходима въртяща се четка, която ще почиства повърхността, ще повдига килима и ще измете отпадъците. Това изисква още един или два двигателя.
Система, която ще контролира всичко това. Най-простият вариант е платка Arduino. Всяка платка ще свърши работа за тази задача; платките Nano или Pro mini са с правилния размер за работата.
Идея №1: Роботизирана прахосмукачка, изработена от картон
Основата на робота е изработена от дебел картон. Най-добре е да се залепи на няколко слоя, като влакната са подравнени перпендикулярно. За техническите му компоненти ще ви е необходим следният набор от части:
- Всяка платка Arduino.
- Макетна платка или обикновена макета, по принцип можете да се справите и без нея, просто запояйте всичко.
- 2 ултразвукови сензора за разстояние (далекомер).
- Турбина на прахосмукачка.
- Малък мотор или охладител от компютър.
- Двигатели с редуктори и колела.
- Контролер на двигателя.
- Проводници за свързване на вериги.
- Батерии и контролер за зареждане.
Роботът се нуждае от три литиеви батерии, за да се захранва. Всяка от тях е с напрежение 3,7 V. За зареждането им е необходим контролер, като този на снимката:

Контролер
За управление на задвижващите двигатели на робота е удобно да се използва модул, базиран на микрочип L298. Това е H-мостова схема и можете да я сглобите сами от отделни компоненти, но закупуването на готова платка е по-надеждно. Тя ви позволява да задавате скоростта на роботизираната прахосмукачка и да променяте посоката ѝ.

Контролен модул
За регулиране на скоростта се подава PWM сигнал към пин ENA или ENB, а за да се зададе посоката на въртене, противоположни сигнали се подават към IN1 и IN2 за единия двигател и IN3 и IN4 за другия двигател. Ако IN1 е на логическа 1, а IN2 на логическа 0, двигателят се върти в една посока. За да промените посоката, разменете единиците с нулите. Трябва да се сглоби с Arduino, като се използва следната диаграма (можете да използвате всякакви пинове; посочвате ги в скицата).

Схема на Ардуино
След това трябва да направите основа от картон и да прикрепите колелата към нея. Трябва да получите нещо подобно:

Картонена основа
Ето изглед отдолу. Две задвижващи колела с ъглова скоростна кутия и подвижно колело:

Междуосие
Сега трябва да сглобите веригата, която ще бъде монтирана върху основата. Основата трябва да е с диаметър около 30 см, за да побере както електрониката, така и самия блок на прахосмукачката.

Сглобяване на корпуса
Вместо далекомери, можете да използвате система, монтирана на бронята, свързана с крайни изключватели. При сблъсък с препятствие, системата за управление ще сигнализира за промяна на посоката.

Броня
Можете също така сами да си направите контактни брони. Ще ви е необходим тънък, но твърд проводник, например усукана двойка. За да направите това, създайте контактна площадка от вътрешната страна на бронята, използвайки фолио, и закрепете проводника, както е показано по-долу. Когато роботизираната прахосмукачка се сблъска с мебели или стени, те ще осъществят контакт. Регулирайте разстоянието от проводника до фолиото, за да постигнете желаната чувствителност и да предотвратите фалшиви аларми. Към фолиото се подава 5V и проводникът отива към входа на Arduino, издърпан към отрицателен полюс през резистор от няколко килоома.

Домашна контактна броня
Устройството се захранва от батерии; линейни стабилизатори като l7805 могат да се използват за захранване на системата за управление. Понижаващ преобразувател, като например LM2596, е подходящ за регулиране на скоростта на двигателя.
Най-трудната част е проектирането и сглобяването на прахосмукачката. Ето един груб чертеж:

Диаграма на прахосмукачката
Чупим оригиналните лопатки на вентилатора и прикрепяме турбина на прахосмукачка към ротора му. Важно е турбината да се закрепи точно в центъра, в противен случай ще се създадат дисбаланси и вибрации.

Роботизирана турбина
Ето как изглежда задната част на турбината, когато е прикрепена към ротора на охладителя. Може да се закрепи с горещо лепило или суперлепило.

Изглед на турбината отвътре
Това е всичко - стъпка по стъпка ръководство за сглобяване на робот прахосмукачка от скрап материали. Алгоритъмът ѝ на работа е следният: робот прахосмукачката се движи напред, докато не срещне препятствие. След сблъсъка (или приближаването, ако използвате ултразвукови далекомери), тя спира, отстъпва назад на предварително определено разстояние, завива под произволен ъгъл и продължава да се движи.
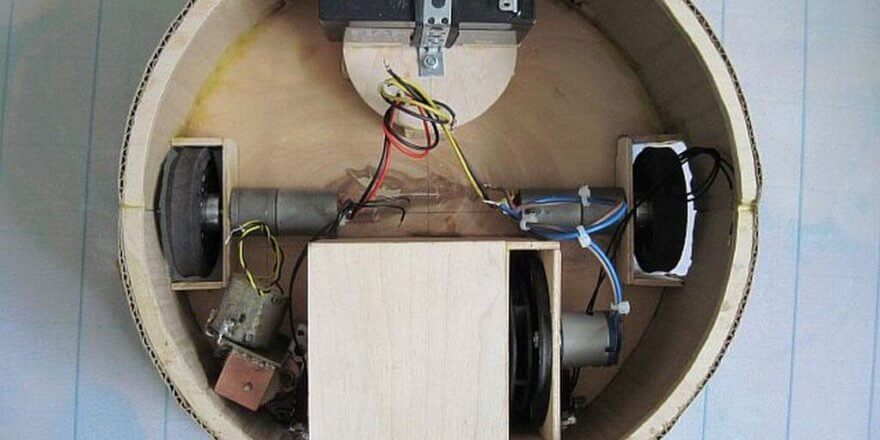
Идея №2: Робот, подобен на почти фабричен
Представяме ви един по-опростен проект за роботизирана прахосмукачка. Ето как изглежда, когато е сглобена:

Домашна роботизирана прахосмукачка
Навигационната система е сглобена от комплект от шест инфрачервени сензора за препятствия. В случай че нито един от тях не се задейства, са предвидени два контактни сензора (крайни изключватели). Системата за управление на двигателя използва същия драйвер с микрочип L298N. За да я сглобите, ще ви е необходимо:
- Първоначално е използвана платка Arduino, Pro-mini.
- USB-TTL адаптер за програмиране на този модел Arduino. Ако използвате Arduino Nano, няма да ви е необходим, тъй като поддържа програмиране чрез USB.
- Драйвер за двигатели L298N.
- Мотори за колела с редуктор.
- 6 инфрачервени сензора.
- Двигатели за турбината (ако е възможно, по-мощни).
- Работно колело на турбината на прахосмукачката.
- Четковидните двигатели могат да бъдат всякакви.
- 2 сензора за сблъсък.
Сглобете всичко това по тази схема:

Схема на сглобяване на робот прахосмукачка
За да сглобите захранващата верига на роботизирана прахосмукачка, ще ви е необходимо:
- 4 литиеви батерии, тип 18650 са подходящи.
- 2 DC/DC преобразувателя (повишаващ и понижаващ).
- Контролер за зареждане и разреждане на две батерии (потърсете онлайн „2s li-ion controller“). Схемата използва последователно свързване на две паралелно свързани клетки, което води до изходно напрежение по-голямо от 7,4 V. Паралелната схема се използва за увеличаване на капацитета и живота на батерията.
Ето схемата на захранването за този робот:

Диаграма на захранването
Освен това ще ви е необходима пластмаса (PVC) или друг материал за тялото на робота; можете да го отпечатате на 3D принтер, ако имате такава възможност.
Този „Направи си сам“ проект изисква фърмуер. Ето пример за алгоритъм за произволно почистване, който намерихме онлайн. Изтеглете скицата оттук: фърмуер за робот прахосмукачка.
Тази статия обсъжда два дизайна на роботизирани прахосмукачки, които можете да копирате и сглобите сами. Можете да сглобите автоматична прахосмукачка за стая за между 30 и 100 долара. Най-скъпите компоненти са батериите, моторите и платките Arduino. Ако успешно сте сглобили домашно приготвена роботизирана прахосмукачка или сте измислили различен дизайн, моля, споделете вашите примери в коментарите. Приветстваме откритата комуникация!
Накрая препоръчваме да гледате тези видеоклипове, които ясно демонстрират още няколко идеи за направата на роботизирана прахосмукачка у дома:








Благодаря за статията!
За ваша информация, „двигателя“ не е дума на руски.
Но това е само козметичен дефект на статията.)
Здравейте, аз съм Юри, довършвам строителен проект, има море от прах, имах идеята да направя робот прахосмукачка, но знам за електрониката само толкова, колкото бих знаел в училище. Разгледах някои материали, хареса ми метлата Meleon, ако я сложите на робот прахосмукачка, ще остави малък ъгъл непочистен, а хоризонталната четка може да се направи както пожелаете.
Много благодаря!!! Това е много ясно! А как да се уверя, че храната ще бъде върната в базата?